Apakah itu dan cara penggantungan adaptif berfungsi
Содержание
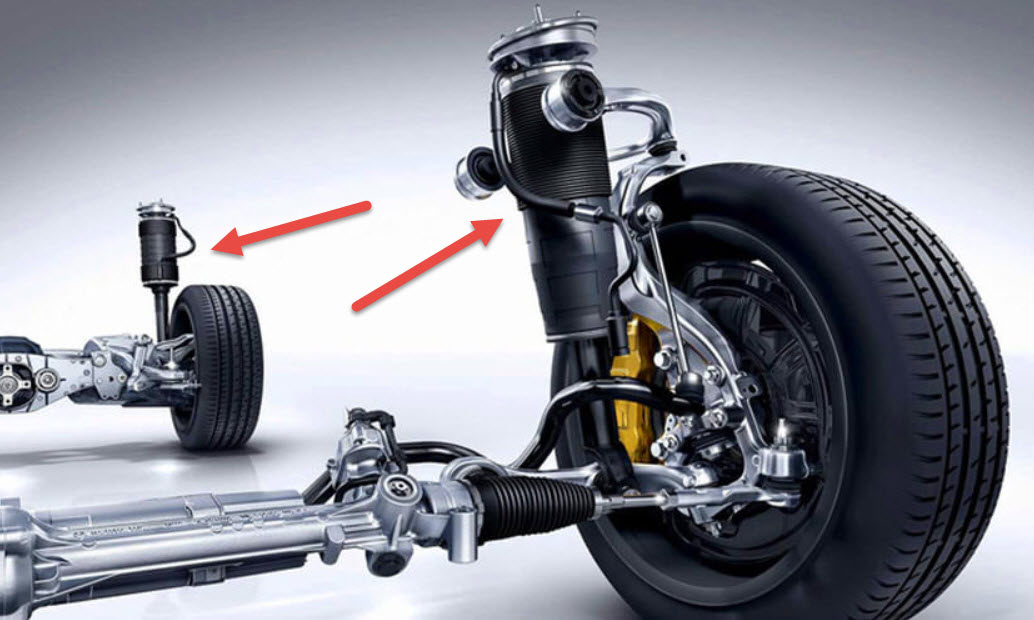
Satu cara untuk menambah baik penggantungan kereta ialah menyesuaikannya dengan sifat jalan raya, kelajuan atau gaya pemanduan. Ia adalah mungkin untuk melaksanakannya dengan menggunakan peralatan elektronik dan penggerak elektromagnet, pneumatik dan hidraulik berkelajuan tinggi. Kereta yang sama, dengan perubahan pantas dalam ciri penggantungan, boleh memperoleh kebolehan individu kereta sukan jalan raya, SUV atau trak ringan. Atau hanya meningkatkan keselesaan penumpang dengan ketara.
Asas penganjuran penyesuaian
Untuk mendapatkan keupayaan untuk menyesuaikan diri dengan pengaruh luar atau arahan pemandu, penggantungan mesti memperoleh watak aktif. Mekanisme pasif sentiasa bertindak balas secara tegas terhadap pengaruh tertentu. Mereka yang aktif dapat mengubah ciri-ciri mereka. Untuk melakukan ini, mereka mempunyai unit elektronik kawalan, iaitu komputer yang mengumpul maklumat daripada penderia dan sistem kenderaan lain, menerima arahan daripada pemandu dan, selepas memproses, menetapkan mod kepada penggerak.

Seperti yang anda ketahui, penggantungan terdiri daripada elemen elastik, peranti redaman dan ram pemandu. Secara teorinya, adalah mungkin untuk mengawal semua komponen ini, tetapi dalam praktiknya ia cukup untuk mengubah sifat peredam (penyerap kejutan). Ini agak mudah dilakukan dengan prestasi yang boleh diterima. Walaupun jika kelajuan tindak balas tidak diperlukan, sebagai contoh, mod letak kereta, perubahan dalam pelepasan tanah atau kekakuan statik tertakluk kepada pelarasan, maka adalah mungkin untuk menyesuaikan konfigurasi penggantungan untuk semua komponennya.
Untuk penyesuaian operasi, adalah perlu untuk mengambil kira banyak parameter input:
- data tentang penyelewengan permukaan jalan, semasa dan akan datang;
- kelajuan pergerakan;
- arah, iaitu, sudut putaran roda kemudi dan pecutan sudut kereta secara keseluruhan;
- kedudukan dan kelajuan putaran stereng;
- keperluan pemandu mengikut analisis gaya pemanduannya, serta yang dimasukkan dalam mod manual;
- kedudukan badan berbanding jalan raya, parameter perubahannya dari semasa ke semasa;
- isyarat sensor jenis radar yang menganalisis keadaan liputan di hadapan kereta;
- pecutan membujur dan melintang mod pengendalian kereta, enjin dan sistem brek.
Program blok kawalan mengandungi algoritma untuk bertindak balas kepada semua isyarat masuk dan untuk mengumpul maklumat. Arahan biasanya dihantar kepada penyerap hentak dikawal secara elektrik bagi semua roda, secara individu untuk setiap roda, serta kepada gandingan aktif bar anti-gulung. Atau kepada peranti yang menggantikannya apabila berfungsi sebagai sebahagian daripada penggantungan terkawal hidraulik sepenuhnya, serta produk paling berteknologi tinggi yang berfungsi secara eksklusif pada interaksi elektromagnet. Dalam kes kedua, kelajuan tindak balas adalah sangat tinggi sehingga tingkah laku yang hampir ideal boleh dicapai daripada operasi penggantungan.
Komposisi Sistem
Kompleks ini termasuk peranti yang menyediakan kerja pada peraturan sifat redaman dan kekakuan dinamik, serta meminimumkan gulungan badan:
- pengawal penggantungan dengan mikropemproses, memori dan litar I/O;
- mekanisme aktif untuk menangkis roll (bar anti-roll terkawal);
- kompleks sensor;
- penyerap hentak yang membenarkan kawalan elektronik kekakuan.
Kawalan papan pemuka, selalunya ini adalah paparan interaktif on-board, pemandu boleh menetapkan salah satu mod operasi mengikut keutamaannya. Penguasaan keselesaan, kesukanan atau keupayaan luar jalan dibenarkan, serta penyesuaian fungsi yang lebih maju dengan memori mod. Penyesuaian terkumpul boleh ditetapkan semula dengan segera kepada tetapan asal.

Keperluan untuk penstabil melintang sentiasa menjadi kontroversi. Di satu pihak, tujuan mereka adalah untuk memastikan roll badan yang minimum. Tetapi dengan cara ini penggantungan memperoleh watak pergantungan, yang bermaksud keselesaan berkurangan. Apabila memandu di jalan yang buruk, ciri yang lebih berharga adalah lebih banyak kebebasan roda individu untuk mencapai artikulasi maksimum gandar. Hanya dengan cara ini, semua rizab perjalanan penggantungan akan digunakan sepenuhnya untuk memastikan sentuhan berterusan tayar dengan salutan. Penstabil dengan kekakuan berterusan, yang biasanya merupakan bar mudah keluli spring, bekerja pada prinsip bar kilasan, tidak akan dapat berfungsi dengan baik dalam semua keadaan.
Dalam penggantungan aktif, penstabil berpecah, dengan kemungkinan peraturan elektronik. Prinsip yang berbeza boleh digunakan untuk mengawal kekakuan yang dikurangkan. Sesetengah pengeluar menggunakan pramuat untuk memutar oleh motor elektrik dengan kotak gear, yang lain menggunakan kaedah hidraulik, memasang silinder hidraulik pada penstabil atau lampirannya pada badan. Ia juga mungkin untuk meniru bar penstabil sepenuhnya dengan silinder hidraulik individu yang beroperasi selari dengan elemen elastik.
Penyerap kejutan yang boleh dilaraskan
Penyerap hentak konvensional mempunyai sifat mengubah kekukuhan dinamiknya bergantung pada kelajuan dan pecutan pergerakan rod. Ini dicapai dengan sistem injap pendikit yang melaluinya bendalir redaman mengalir.
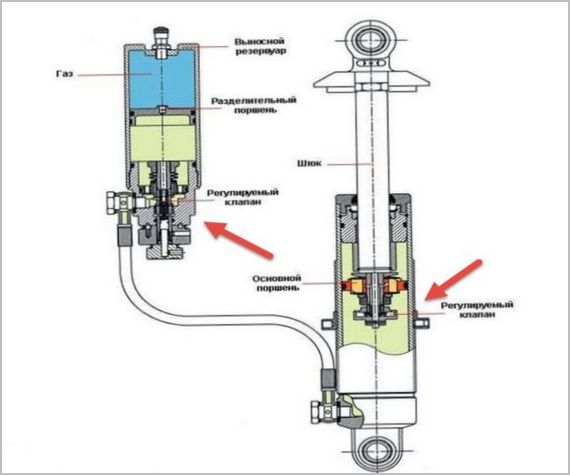
Untuk kawalan operasi pendikit pintasan, dua cara boleh dilakukan - memasang injap elektromagnet jenis kili atau menukar sifat cecair dalam medan magnet. Pengilang menggunakan kedua-dua kaedah, yang kedua kurang kerap, kerana ia memerlukan cecair khas yang mengubah kelikatannya dalam medan magnet.
Perbezaan operasi utama penggantungan adaptif
Penggantungan aktif dengan sifat penyesuaian memberikan keupayaan untuk mengawal kualiti pengguna kereta secara pemrograman di mana-mana jalan:
- badan sentiasa mengekalkan kedudukan tertentu berbanding dengan jalan raya, sisihan yang hanya ditentukan oleh kelajuan sistem penyesuaian;
- roda mempunyai sentuhan berterusan maksimum yang boleh dicapai dengan salutan;
- tahap pecutan dalam kabin dari benjolan jauh lebih rendah daripada dengan penggantungan tradisional, yang meningkatkan keselesaan perjalanan;
- kereta lebih dikawal dan lebih stabil pada kelajuan tinggi;
- sistem tercanggih boleh menjangka bonggol dengan mengimbas jalan di hadapan roda dan melaraskan peredam terlebih dahulu.
Kelemahannya, seperti semua sistem yang kompleks, adalah satu - kerumitan yang tinggi dan penunjuk kebolehpercayaan dan kos yang berkaitan. Oleh itu, penggantungan adaptif digunakan dalam segmen premium atau sebagai peralatan pilihan.
Algoritma kerja dan satu set peralatan sentiasa menjadi lebih kompleks dan bertambah baik. Matlamat utama pembangunan dalam bidang suspensi adaptif aktif adalah untuk mencapai baki maksimum badan kereta, apa sahaja yang berlaku pada roda dan jisim tidak disprung yang berkaitan. Dalam kes ini, keempat-empat roda mesti sentiasa mengekalkan hubungan dengan jalan raya, mengekalkan kereta pada trajektori tertentu.